open-line cablecam
2026
hardware design, electronics design
tools: fusion 360, arduino-ide, easyEDA
a low-cost, open source cable cam for action sports filmmaking.
table of contents
1. project goal + research 2. electronics system + software 3. hardware 4. setting up the line
the catalyst + goal
very few off-the-shelf cablecam systems exist, and those that do cost, at minimum, $2000 for the carriage assembly alone. for hobbyist filmmakers, this price tag is a prohibitive barrier that places them largely out of reach.

my primary goal with this project was to synthesize the mechanical, electrical, and user-experience design principles behind professional cablecam systems, and then recreate a product that meets — and in several ways exceeds — the capabilities of those systems using a combination of off-the-shelf components, 3D-printed parts, and open-source code. the result was a sub-$500 cablecam platform that anyone can replicate, modify, or adapt to their own needs.
the electronics system
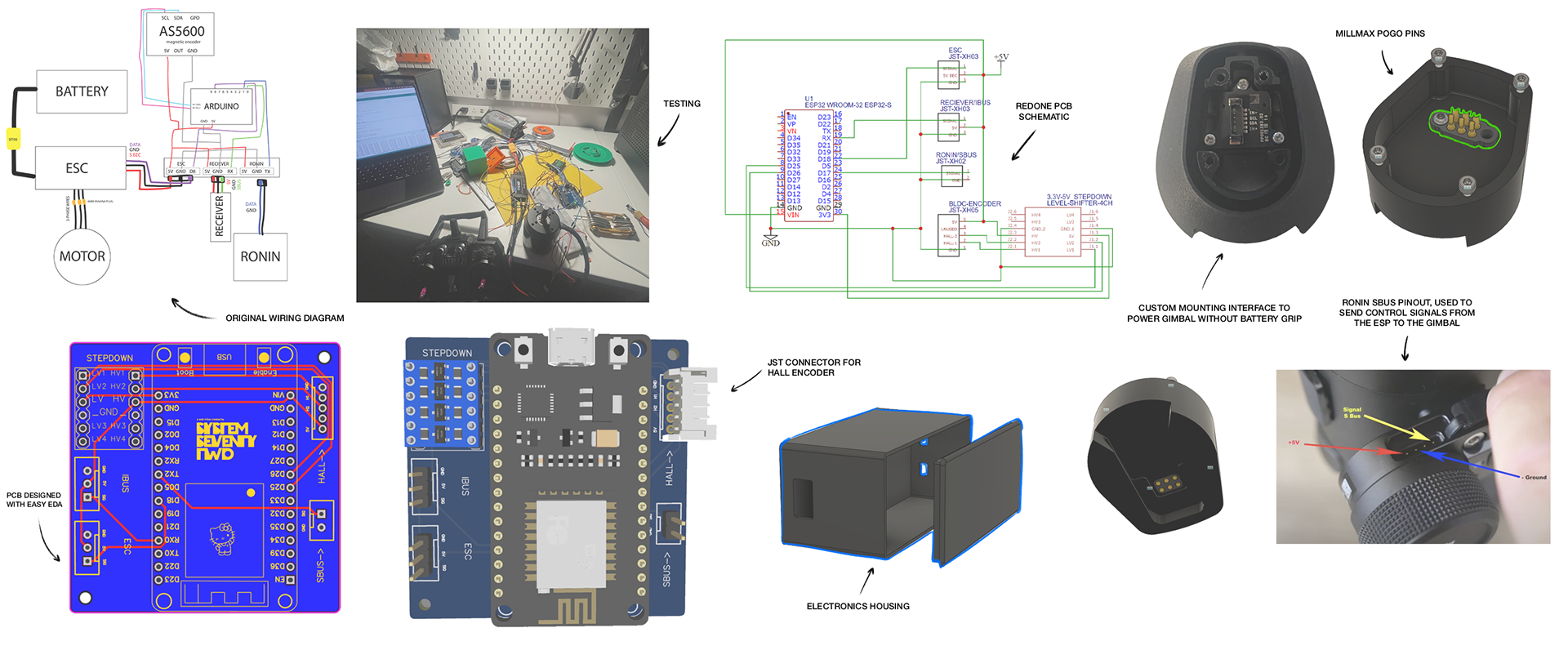
originally, the system was composed of an arduino uno, a 320kv brushless motor, a 5000mah 6s lipo battery, an 80a ESC (electronic speed controller), and a flysky i6x controller and i10ab receiver. the i6x would send out 10 channels of data via iBus which would feed into a UART port on the microcontroller. these channels could then be used to control all other aspects of the system, like the motor and gimbal.
however, i quickly ran into the issue of needing to both receive data via UART (iBUS from the controller) and send out data via UART (SBUS to control the gimbal). the arduino uno only has a single UART channel, and software serial isn't fast enough to handle SBUS's 100k baud rate. for this reason, i switched the whole system to be based on an esp32 which has 3 UART channels and the added benefit of being able to host a local web server to view telemetry.
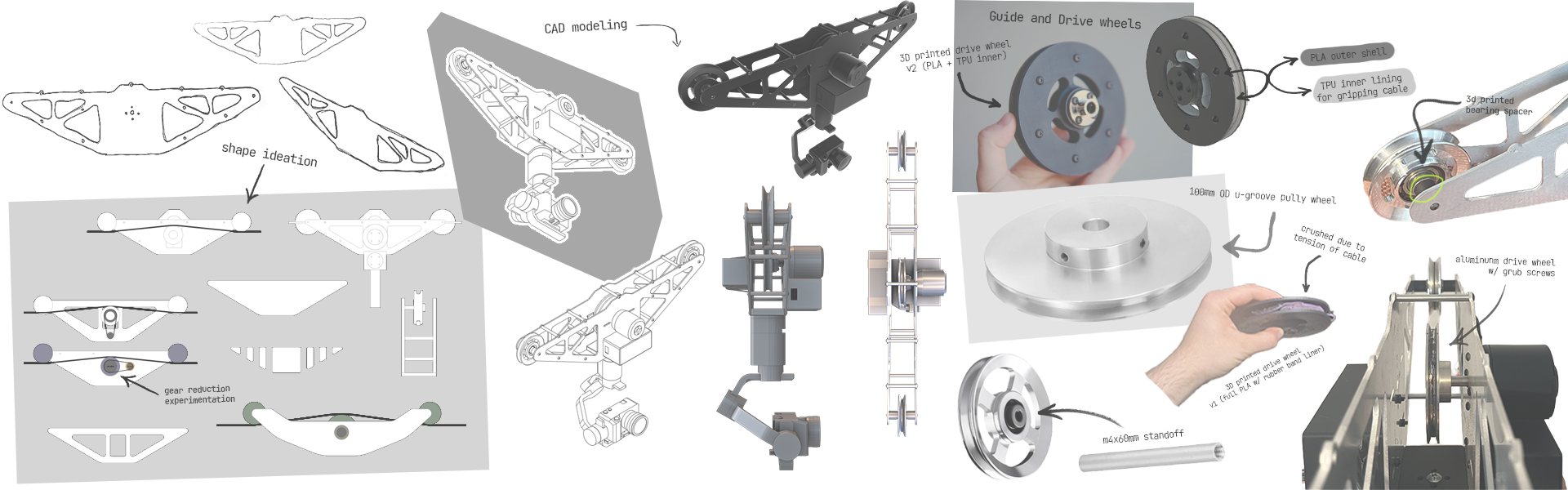
hardware
as with the electronics, my main focus was using as many readily available components as possible. these included gym pully wheels for the two guide wheels, M4x60mm threaded standoffs for spacing the two chassis sides, and supplementing components that needed to be custom, with 3D printed parts. those ended up being spacers to adapt the 10mm ID bearings on the guide wheels to the 6mm OD standoffs, housing for the electronics and battery, and a 1/4-20" cheese plate to which the gimbal mounts (this will ideally be replaced by a machined part soon).
the frame itself was laser cut out of 5052 aluminum by SendCutSend who were able to cut, ship, and deliver the parts in sub 48-hours. similar services for slightly cheaper but with longer turnarounds are available through JLCPCB and PCBWay.
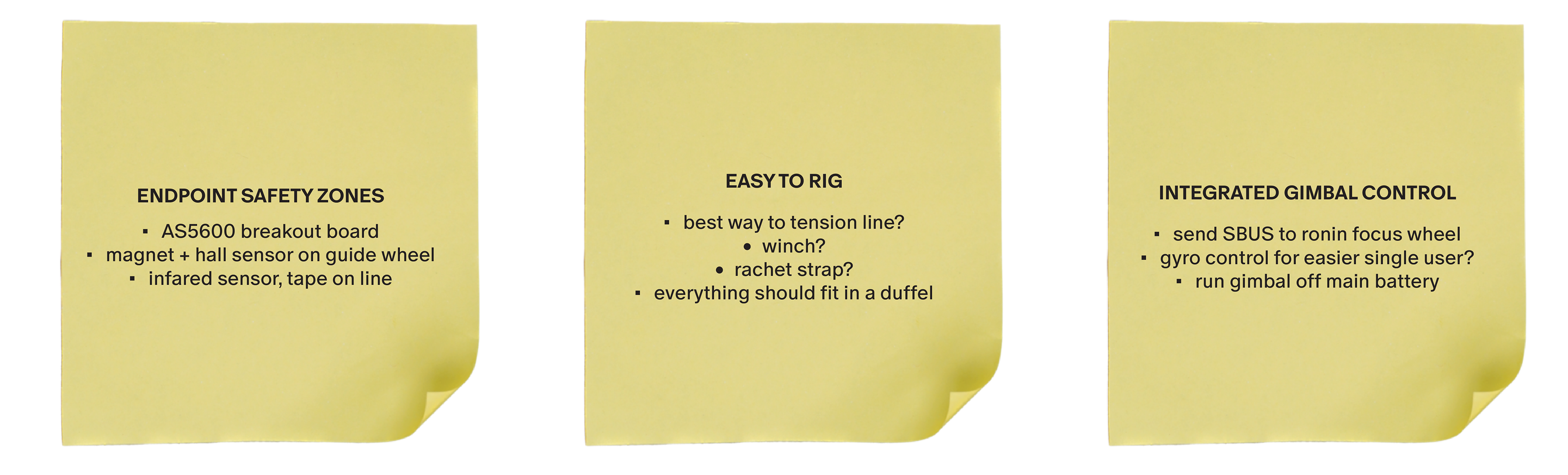
the first proper test of the system revealed several things:
1. since the full electronics package wasn't installed yet, controlling the gimbal was done via the ronin app - and the bluetooth range just wasn't adequate to retain connection anywhere over ~30ft.
2. while the ratchet strap adequately took tension off one side of the line, the non ratcheted side slipped down over time. another strap, or something to prevent the line from slipping (a towel or something) is necessary.

make your own
this project started because there wasn't much information about cablecams out there on the internet, and through building my own, i've gathered and synthesized a lot of important bits about them. that knowledge, along with everything else (parts list, fabrication files, code, instructions, etc) will all be available here for free very very soon. i'm taking time to present all the information in a user friendly and easy to understand way.